Object detection
Contents
# Install the necessary dependencies
import os
import sys
!{sys.executable} -m pip install --quiet pandas scikit-learn numpy matplotlib jupyterlab_myst ipython tensorflow tensorpack typing
27. Object detection#
27.1. What is object detection?#
In this chapter we will introduce the object detection problem which can be described in this way: given an image or a video stream, an object detection model can identify which of a known set of objects might be present and provide information about their positions within the image.
For example, this screenshot of the example application shows how three objects have been recognized and their positions annotated:

Fig. 27.1 Example of the object detection task#
Object detection has now been widely used in many real-world applications, such as autonomous driving, robot vision, video surveillance, etc. The following image shows the growing number of publications that are associated with “object detection” over the past two decades.
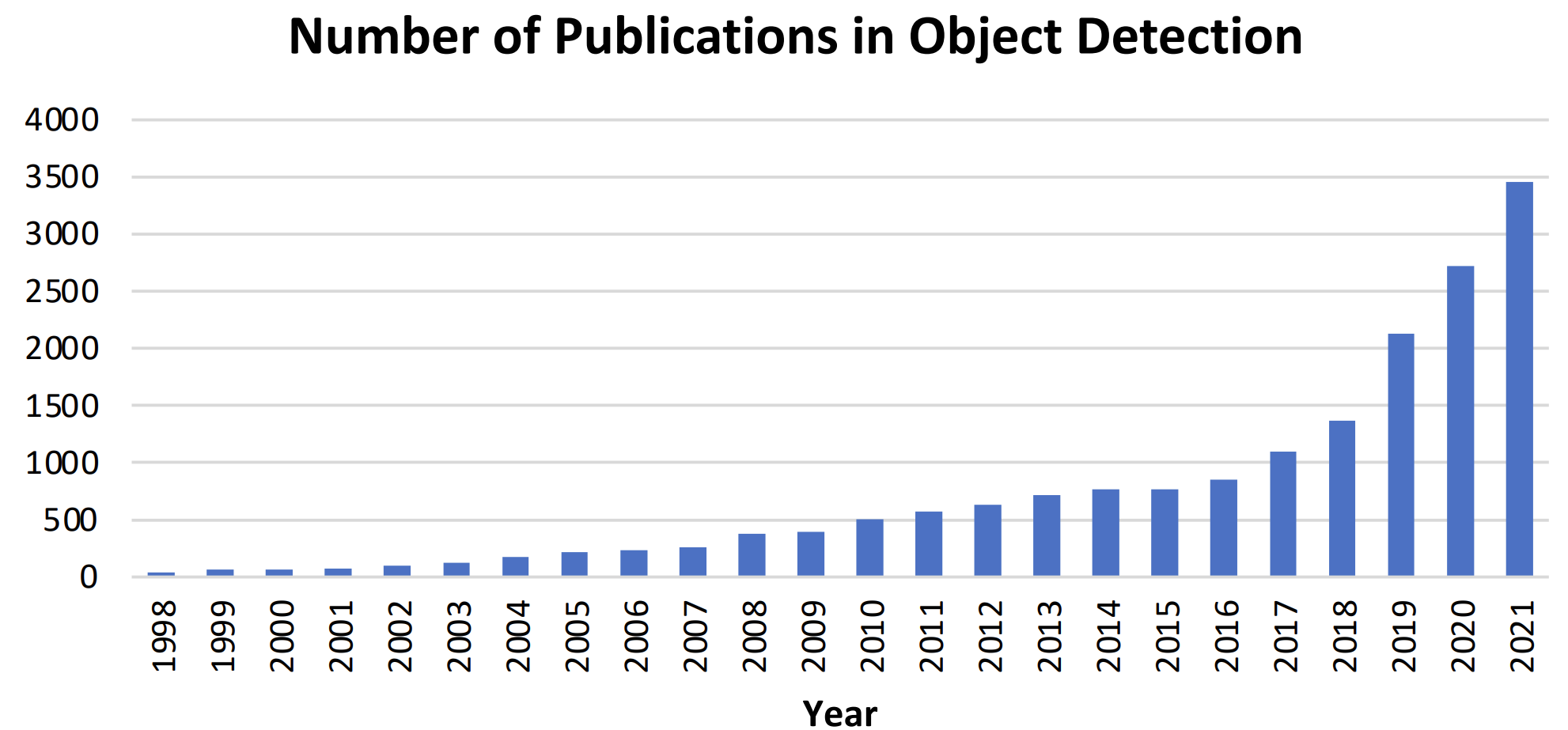
Fig. 27.2 The increasing number of publications in object detection from 1998 to 2021#
27.2. Challenges#
In addition to some common challenges in other computer vision tasks such as objects under different viewpoints, illuminations,and intra-class variations, the challenges in object detection include but are not limited to the following aspects:
object rotation and scale changes (e.g., small objects);
accurate object localization;
dense and occluded object detection;
speed up of detection, etc.
27.3. History & classic models#
Since image classification is a classic task for computer vision, there are several models that are well-performed in the past. We can list them as follows: Faster R-CNN, Mask R-CNN, YOLO, FCOS, DETR. In this part, we will introduce them in order.
27.3.1. Faster R-CNN#
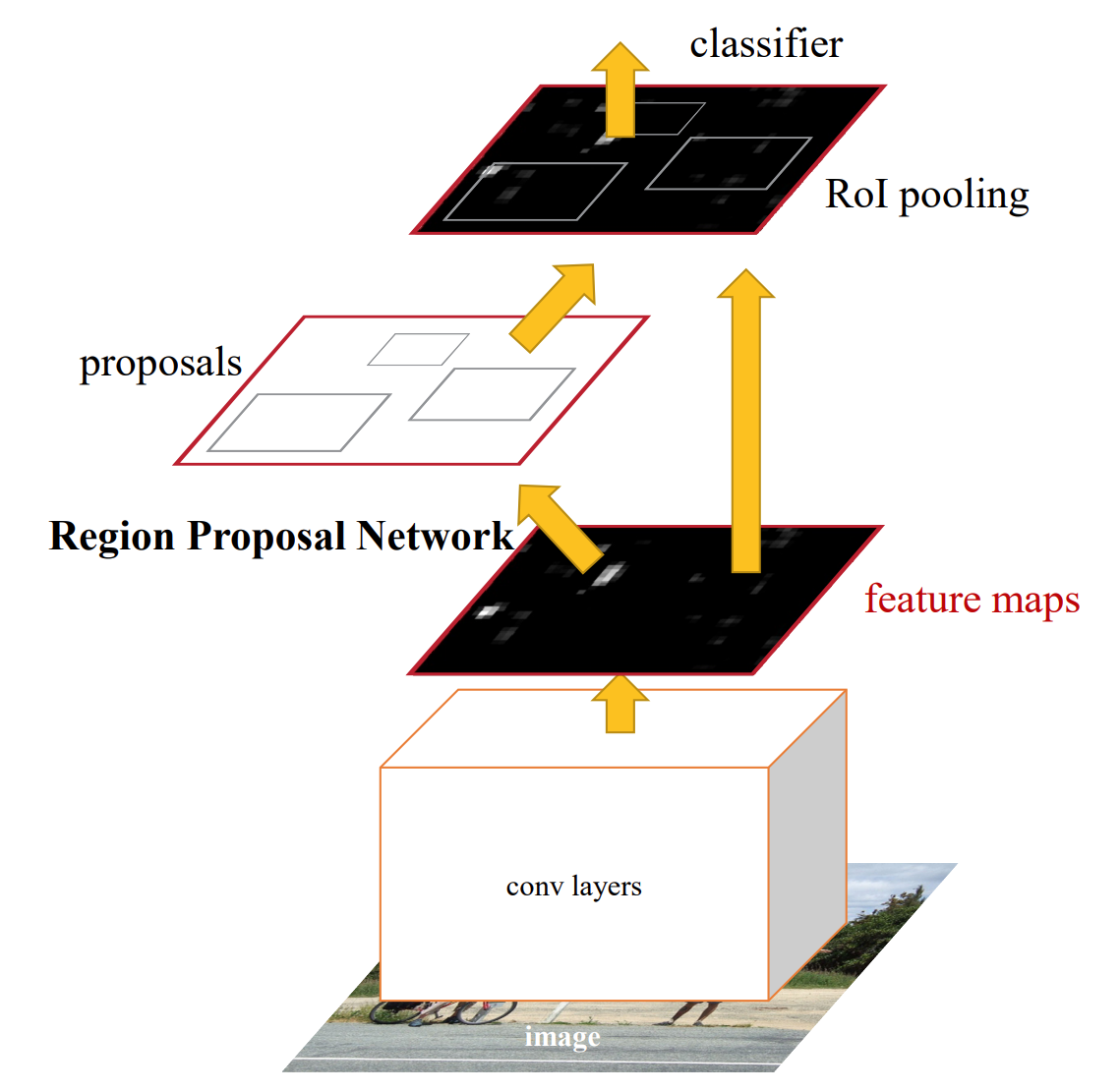
Faster R-CNN is a single, unified network for object detection that utilizes a region proposal network (RPN) with the CNN model2. The RPN shares full-image convolutional features with the detection network, enabling nearly cost-free region proposals2. It is a fully convolutional network that simultaneously predicts object bounds and objectness scores at each position.
Note
We can see the paper here.
27.3.1.1. Code#
Due to the complexity, here we just introduce the key parts of the model, Region Proposal Network(RPN).
import tensorflow as tf
from tensorpack.models import Conv2D
from tensorpack.tfutils.argscope import argscope
def rpn_head(featuremap, channel, num_anchors):
"""
Returns:
label_logits: fHxfWxNA
box_logits: fHxfWxNAx4
"""
with argscope(Conv2D, data_format='channels_first',
kernel_initializer=tf.random_normal_initializer(stddev=0.01)):
hidden = Conv2D('conv0', featuremap, channel, 3, activation=tf.nn.relu)
label_logits = Conv2D('class', hidden, num_anchors, 1)
box_logits = Conv2D('box', hidden, 4 * num_anchors, 1)
# 1, NA(*4), im/16, im/16 (NCHW)
label_logits = tf.transpose(label_logits, [0, 2, 3, 1]) # 1xfHxfWxNA
label_logits = tf.squeeze(label_logits, 0) # fHxfWxNA
shp = tf.shape(box_logits) # 1x(NAx4)xfHxfW
box_logits = tf.transpose(box_logits, [0, 2, 3, 1]) # 1xfHxfWx(NAx4)
box_logits = tf.reshape(box_logits, tf.stack([shp[2], shp[3], num_anchors, 4])) # fHxfWxNAx4
return label_logits, box_logits
See also
The complete version of Faster R-CNN can be found here.
27.3.2. Mask R-CNN#
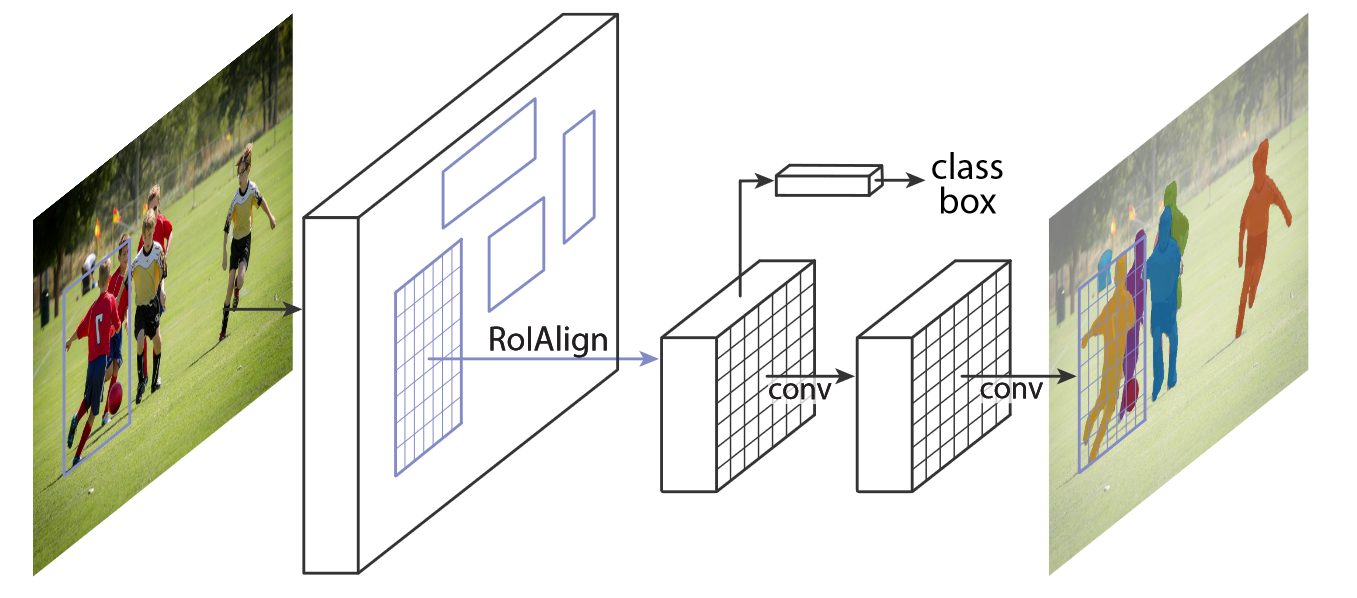
Mask R-CNN is a deep neural network aimed to solve both object detection and instance segmentation problems. In other words, it can separate different objects in an image. You give it an image, it gives you the object bounding boxes, classes and masks. Mask R-CNN was developed on top of Faster R-CNN, a Region-Based Convolutional Neural Network. It is simple to train and adds only a small overhead to Faster R-CNN, running at 5 fps.
Note
We can see the paper here.
27.3.2.1. Code#
The key parts in Mask RCNN are:
RoIAlign
import tensorflow as tf
from tensorpack.tfutils.scope_utils import under_name_scope
def crop_and_resize(image, boxes, box_ind, crop_size, pad_border=True):
"""
Aligned version of tf.image.crop_and_resize, following our definition of floating point boxes.
Args:
image: NCHW
boxes: nx4, x1y1x2y2
box_ind: (n,)
crop_size (int):
Returns:
n,C,size,size
"""
assert isinstance(crop_size, int), crop_size
boxes = tf.stop_gradient(boxes)
# TF's crop_and_resize produces zeros on border
if pad_border:
# this can be quite slow
image = tf.pad(image, [[0, 0], [0, 0], [1, 1], [1, 1]], mode='SYMMETRIC')
boxes = boxes + 1
@under_name_scope()
def transform_fpcoor_for_tf(boxes, image_shape, crop_shape):
"""
The way tf.image.crop_and_resize works (with normalized box):
Initial point (the value of output[0]): x0_box * (W_img - 1)
Spacing: w_box * (W_img - 1) / (W_crop - 1)
Use the above grid to bilinear sample.
However, what we want is (with fpcoor box):
Spacing: w_box / W_crop
Initial point: x0_box + spacing/2 - 0.5
(-0.5 because bilinear sample (in my definition) assumes floating point coordinate
(0.0, 0.0) is the same as pixel value (0, 0))
This function transform fpcoor boxes to a format to be used by tf.image.crop_and_resize
Returns:
y1x1y2x2
"""
x0, y0, x1, y1 = tf.split(boxes, 4, axis=1)
spacing_w = (x1 - x0) / tf.cast(crop_shape[1], tf.float32)
spacing_h = (y1 - y0) / tf.cast(crop_shape[0], tf.float32)
imshape = [tf.cast(image_shape[0] - 1, tf.float32), tf.cast(image_shape[1] - 1, tf.float32)]
nx0 = (x0 + spacing_w / 2 - 0.5) / imshape[1]
ny0 = (y0 + spacing_h / 2 - 0.5) / imshape[0]
nw = spacing_w * tf.cast(crop_shape[1] - 1, tf.float32) / imshape[1]
nh = spacing_h * tf.cast(crop_shape[0] - 1, tf.float32) / imshape[0]
return tf.concat([ny0, nx0, ny0 + nh, nx0 + nw], axis=1)
image_shape = tf.shape(image)[2:]
boxes = transform_fpcoor_for_tf(boxes, image_shape, [crop_size, crop_size])
image = tf.transpose(image, [0, 2, 3, 1]) # nhwc
ret = tf.image.crop_and_resize(
image, boxes, tf.cast(box_ind, tf.int32),
crop_size=[crop_size, crop_size])
ret = tf.transpose(ret, [0, 3, 1, 2]) # ncss
return ret
def roi_align(featuremap, boxes, resolution):
"""
Args:
featuremap: 1xCxHxW
boxes: Nx4 floatbox
resolution: output spatial resolution
Returns:
NxCx res x res
"""
# sample 4 locations per roi bin
ret = crop_and_resize(
featuremap, boxes,
tf.zeros(tf.shape(boxes)[0], dtype=tf.int32),
resolution * 2)
try:
avgpool = tf.nn.avg_pool2d
except AttributeError:
avgpool = tf.nn.avg_pool
ret = avgpool(ret, [1, 1, 2, 2], [1, 1, 2, 2], padding='SAME', data_format='NCHW')
return ret
Mask
import tensorflow as tf
from tensorpack import tfv1
from tensorpack.models import Conv2D, Conv2DTranspose,layer_register
from tensorpack.tfutils.argscope import argscope
def maskrcnn_upXconv_head(feature, num_category, num_convs, norm=None):
"""
Args:
feature (NxCx s x s): size is 7 in C4 models and 14 in FPN models.
num_category(int):
num_convs (int): number of convolution layers
norm (str or None): either None or 'GN'
Returns:
mask_logits (N x num_category x 2s x 2s):
"""
assert norm in [None, 'GN'], norm
l = feature
with argscope([Conv2D, Conv2DTranspose], data_format='channels_first',
kernel_initializer=tfv1.variance_scaling_initializer(
scale=2.0, mode='fan_out',
distribution='untruncated_normal')):
# c2's MSRAFill is fan_out
for k in range(num_convs):
l = Conv2D('fcn{}'.format(k), l, 256, 3, activation=tf.nn.relu)
if norm is not None:
l = GroupNorm('gn{}'.format(k), l)
l = Conv2DTranspose('deconv', l, 256, 2, strides=2, activation=tf.nn.relu)
l = Conv2D('conv', l, num_category, 1, kernel_initializer=tf.random_normal_initializer(stddev=0.001))
return l
@layer_register(log_shape=True)
def GroupNorm(x, group=32, gamma_initializer=tf.constant_initializer(1.)):
"""
More code that reproduces the paper can be found at https://github.com/ppwwyyxx/GroupNorm-reproduce/.
"""
shape = x.get_shape().as_list()
ndims = len(shape)
assert ndims == 4, shape
chan = shape[1]
assert chan % group == 0, chan
group_size = chan // group
orig_shape = tf.shape(x)
h, w = orig_shape[2], orig_shape[3]
x = tf.reshape(x, tf.stack([-1, group, group_size, h, w]))
mean, var = tf.nn.moments(x, [2, 3, 4], keep_dims=True)
new_shape = [1, group, group_size, 1, 1]
beta = tf.get_variable('beta', [chan], initializer=tf.constant_initializer())
beta = tf.reshape(beta, new_shape)
gamma = tf.get_variable('gamma', [chan], initializer=gamma_initializer)
gamma = tf.reshape(gamma, new_shape)
out = tf.nn.batch_normalization(x, mean, var, beta, gamma, 1e-5, name='output')
return tf.reshape(out, orig_shape, name='output')
27.3.3. FCOS#
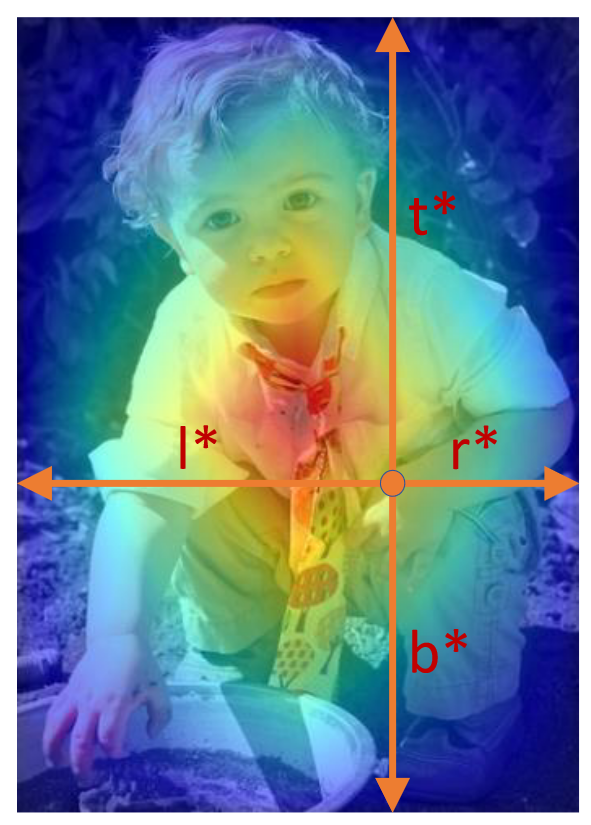
FCOS (Fully Convolutional One-Stage Object Detection) is a one-stage object detection algorithm that uses a fully convolutional architecture to detect objects. It is a simple and effective method for object detection that does not require region proposal networks (RPNs) or anchor boxes.
Note
We can see the paper here.
27.3.3.1. Code#
The key point in FCOS is Center-ness, which is a novel way to calculate target: \(centerness = \sqrt{\frac{min(l,r)}{max(l,r)} \frac{min(t,b)}{max(t,b)}}\)
import tensorflow as tf
class CenternessNet(tf.keras.layers.Layer):
def __init__(self, n_anchor, use_bias = None, concat = False, convolution = tf.keras.layers.Conv2D, normalize = None, activation = tf.keras.activations.sigmoid, **kwargs):
super(CenternessNet, self).__init__(**kwargs)
self.n_anchor = n_anchor
self.use_bias = (normalize is None) if use_bias is None else use_bias
self.concat = concat
self.activation = activation
self.convolution = convolution
self.normalize = normalize
def build(self, input_shape):
if not isinstance(input_shape, (tuple, list)):
input_shape = [input_shape]
self.layers = [self.convolution(self.n_anchor, 3, padding = "same", use_bias = self.use_bias, name = "head")]
if self.normalize is not None:
self.layers.append(self.normalize(name = "norm"))
self.layers.append(tf.keras.layers.Reshape([-1, 1], name = "reshape"))
if self.concat and 1 < len(input_shape):
self.post = tf.keras.layers.Concatenate(axis = -2, name = "logits_concat")
self.act = tf.keras.layers.Activation(self.activation, dtype = tf.float32, name = "logits")
def call(self, inputs):
if not isinstance(inputs, (tuple, list)):
inputs = [inputs]
out = []
for x in inputs:
for l in self.layers:
x = l(x)
out.append(x)
if len(out) == 1:
out = out[0]
elif self.concat:
out = self.post(out)
if isinstance(out, (tuple, list)):
out = [self.act(o) for o in out]
else:
out = self.act(out)
return out
27.3.4. DETR#
Similar to image classification, Transformer is also used in object detection task, and the classical one is DEtection TRansformer(DETR).
Note
We can see the paper here.
27.3.4.1. Code#
import tensorflow as tf
from keras.layers import Dense
from keras.layers import Conv2D
from keras.layers import Embedding
from typing import Dict
class DETR(tf.keras.Model):
""" This is the DETR module that performs object detection """
def __init__(self,
backbone: tf.keras.Model,
transformer: tf.keras.Model,
num_classes: int,
num_queries: int,
aux_loss: bool = False,
**kwargs):
super(DETR, self).__init__(**kwargs)
self.num_queries = num_queries
self.transformer = transformer
hidden_dim = transformer.d_model
self.class_embed = Dense(num_classes+1, name='class_embed')
self.bbox_embed = MLP(hidden_dim, 4, 3, name='bbox_embed')
self.query_embed = Embedding(num_queries, hidden_dim, name='query_embed')
self.query_embed.build((num_queries, hidden_dim))
self.input_proj = Conv2D(hidden_dim, 1, name='input_proj')
self.backbone = backbone
self.aux_loss = aux_loss
def call(self, samples: Dict):
features, pos = self.backbone(samples)
src, mask = features[-1][1]['img'], features[-1][1]['mask']
assert mask is not None
hs = self.transformer(self.input_proj(src), mask, self.query_embed.weights[0], pos[-1][1])
class MLP(tf.keras.layers.Layer):
def __init__(self,
hidden_dim: int,
output_dim: int,
num_layers: int,
**kwargs):
self(MLP, self).__init__(**kwargs)
self.num_layers = num_layers
h = [hidden_dim] * (num_layers - 1)
self.layers = [Dense(k) for k in h+[output_dim]]
def call(self, x):
for i, layer in enumerate(self.layers):
x = tf.nn.relu(layer(x)) if i < self.num_layers - 1 else layer(x)
return x
See also
The complete version of DETR can be found here.
27.4. Your turn! 🚀#
Assignment - Car object detection
27.5. Acknowledgments#
Thanks to Tensorpack for creating the open-source project tensorpack, Hyungjin Kim for creating the open-source project TFDetection and PaperCodeReview for creating the open-source project DETR-TF. They inspire the majority of the content in this chapter.
A demo of object detection. [source]
- KHG
Piotr Dollar Kaiming He, Georgia Gkioxari and Ross Girshick. Mask r-cnn. URL: https://arxiv.org/abs/1703.06870 (visited on 2023).
- SRS
Ross Girshick Shaoqing Ren, Kaiming He and Jian Sun. Faster r-cnn. URL: https://arxiv.org/abs/1506.01497 (visited on 2023).
- ZTH
Hao Chen Zhi Tian, Chunhua Shen and Tong He. Fcos: fully convolutional one-stage object detection. URL: https://arxiv.org/abs/1904.01355 (visited on 2023).