Summary
Contents
42.122. Summary#
This notebook shows how to train Denoising Difussion Models.
The code has been adapted and curated from this tutorial by Andras Beres.
42.122.1. Hyperparams#
import numpy as np
import math
import tensorflow as tf
import tensorflow_datasets as tfds
import tensorflow_addons as tfa
import matplotlib.pyplot as plt
import os
# data
diffusion_steps = 20
image_size = 32
# sampling
min_signal_rate = 0.02
max_signal_rate = 0.95
# optimization
batch_size = 64
num_epochs = 10
learning_rate = 1e-3
weight_decay = 1e-4
ema = 0.999
42.122.2. Dataset#
def preprocess_image(data):
# center crop image
height = tf.shape(data["image"])[0]
width = tf.shape(data["image"])[1]
crop_size = tf.minimum(height, width)
image = tf.image.crop_to_bounding_box(
data["image"],
(height - crop_size) // 2,
(width - crop_size) // 2,
crop_size,
crop_size,
)
# resize and clip
# for image downsampling it is important to turn on antialiasing
image = tf.image.resize(image, size=[image_size, image_size], antialias=True)
return tf.clip_by_value(image / 255.0, 0.0, 1.0)
def prepare_dataset(split):
return (
tfds.load('mnist', split=split, shuffle_files=True)
.map(preprocess_image, num_parallel_calls=tf.data.AUTOTUNE)
.cache()
.repeat(1)
.shuffle(10000)
.batch(batch_size, drop_remainder=True)
.prefetch(buffer_size=tf.data.AUTOTUNE)
)
# load dataset
train_dataset = prepare_dataset("train")
val_dataset = prepare_dataset("test")
42.122.3. Denoising Network#
We will use the Residual U-Net model.
42.122.4. TODO: can we use something simpler?#
embedding_max_frequency = 1000.0
embedding_dims = 64
def sinusoidal_embedding(x):
embedding_min_frequency = 1.0
frequencies = tf.exp(
tf.linspace(
tf.math.log(embedding_min_frequency),
tf.math.log(embedding_max_frequency),
embedding_dims // 2,
)
)
angular_speeds = 2.0 * math.pi * frequencies
embeddings = tf.concat(
[tf.sin(angular_speeds * x), tf.cos(angular_speeds * x)], axis=3
)
return embeddings
42.122.5. Custom Residual Network#
def get_network_custom(image_size, block_depth=17, output_channels=1):
# use the correct number of channels
noisy_images = tf.keras.Input(shape=(image_size, image_size, output_channels))
noise_variances = tf.keras.Input(shape=(1, 1, 1))
e = tf.keras.layers.Lambda(sinusoidal_embedding)(noise_variances)
e = tf.keras.layers.UpSampling2D(size=image_size, interpolation="nearest")(e)
x = tf.keras.layers.Conv2D(32, kernel_size=1)(noisy_images)
x = tf.keras.layers.Concatenate()([x, e])
x = tf.keras.layers.Conv2D(64, 3, padding='same', activation=tf.nn.relu)(x)
for layers in range(2, block_depth+1):
x = tf.keras.layers.BatchNormalization(center=False, scale=False)(x)
x = tf.keras.layers.Conv2D(
64, 3,
padding='same', name='conv%d' % layers,
activation=tf.keras.activations.swish,
use_bias=False
)(x)
x = tf.keras.layers.Conv2D(output_channels, kernel_size=1, kernel_initializer="zeros")(x)
return tf.keras.Model([noisy_images, noise_variances], x, name="simple-residual-net")
42.122.6. Residual U-Net#
widths = [32, 64, 96, 128]
block_depth = 2
def ResidualBlock(width):
def apply(x):
input_width = x.shape[3]
if input_width == width:
residual = x
else:
residual = tf.keras.layers.Conv2D(width, kernel_size=1)(x)
x = tf.keras.layers.BatchNormalization(center=False, scale=False)(x)
x = tf.keras.layers.Conv2D(
width, kernel_size=3, padding="same", activation=tf.keras.activations.swish
)(x)
x = tf.keras.layers.Conv2D(width, kernel_size=3, padding="same")(x)
x = tf.keras.layers.Add()([x, residual])
return x
return apply
def DownBlock(width, block_depth):
def apply(x):
x, skips = x
for _ in range(block_depth):
x = ResidualBlock(width)(x)
skips.append(x)
x = tf.keras.layers.AveragePooling2D(pool_size=2)(x)
return x
return apply
def UpBlock(width, block_depth):
def apply(x):
x, skips = x
x = tf.keras.layers.UpSampling2D(size=2, interpolation="bilinear")(x)
for _ in range(block_depth):
x = tf.keras.layers.Concatenate()([x, skips.pop()])
x = ResidualBlock(width)(x)
return x
return apply
def get_network(image_size, widths, block_depth):
# use the correct number of channels
noisy_images = tf.keras.Input(shape=(image_size, image_size, 1))
noise_variances = tf.keras.Input(shape=(1, 1, 1))
e = tf.keras.layers.Lambda(sinusoidal_embedding)(noise_variances)
e = tf.keras.layers.UpSampling2D(size=image_size, interpolation="nearest")(e)
x = tf.keras.layers.Conv2D(widths[0], kernel_size=1)(noisy_images)
x = tf.keras.layers.Concatenate()([x, e])
skips = []
for width in widths[:-1]:
x = DownBlock(width, block_depth)([x, skips])
for _ in range(block_depth):
x = ResidualBlock(widths[-1])(x)
for width in reversed(widths[:-1]):
x = UpBlock(width, block_depth)([x, skips])
x = tf.keras.layers.Conv2D(1, kernel_size=1, kernel_initializer="zeros")(x)
return tf.keras.Model([noisy_images, noise_variances], x, name="residual_unet")
42.122.7. Difussion Model#
class DiffusionModel(tf.keras.Model):
def __init__(self, network):
super().__init__()
self.normalizer = tf.keras.layers.Normalization()
self.network = network
self.ema_network = tf.keras.models.clone_model(self.network)
def compile(self, **kwargs):
super().compile(**kwargs)
self.noise_loss_tracker = tf.keras.metrics.Mean(name="n_loss")
self.image_loss_tracker = tf.keras.metrics.Mean(name="i_loss")
@property
def metrics(self):
return [self.noise_loss_tracker, self.image_loss_tracker]
def denormalize(self, images):
images = self.normalizer.mean + images * self.normalizer.variance**0.5
return tf.clip_by_value(images, 0.0, 1.0)
def diffusion_schedule(self, diffusion_times):
# diffusion times -> angles
start_angle = tf.acos(max_signal_rate)
end_angle = tf.acos(min_signal_rate)
diffusion_angles = start_angle + diffusion_times * (end_angle - start_angle)
# angles -> signal and noise rates
signal_rates = tf.cos(diffusion_angles)
noise_rates = tf.sin(diffusion_angles)
# note that their squared sum is always: sin^2(x) + cos^2(x) = 1
return noise_rates, signal_rates
def denoise(self, noisy_images, noise_rates, signal_rates, training):
# the exponential moving average weights are used at evaluation
if training:
network = self.network
else:
network = self.ema_network
# predict noise component and calculate the image component using it
pred_noises = network([noisy_images, noise_rates**2], training=training)
pred_images = (noisy_images - noise_rates * pred_noises) / signal_rates
return pred_noises, pred_images
def reverse_diffusion(self, initial_noise, steps):
# reverse diffusion = sampling
batch = initial_noise.shape[0]
step_size = 1.0 / steps
# important line:
# at the first sampling step, the "noisy image" is pure noise
# but its signal rate is assumed to be nonzero (min_signal_rate)
next_noisy_images = initial_noise
for step in range(diffusion_steps):
noisy_images = next_noisy_images
diffusion_times = tf.ones((batch, 1, 1, 1)) - step * step_size
noise_rates, signal_rates = self.diffusion_schedule(diffusion_times)
pred_noises, pred_images = self.denoise(
noisy_images, noise_rates, signal_rates, training=False
)
# this new noisy image will be used in the next step
next_diffusion_times = diffusion_times - step_size
next_noise_rates, next_signal_rates = self.diffusion_schedule(
next_diffusion_times
)
next_noisy_images = (
next_signal_rates * pred_images + next_noise_rates * pred_noises
)
return pred_images
def generate(self, num_images, steps):
# noise -> images -> denormalized images
initial_noise = tf.random.normal(shape=(num_images, image_size, image_size, 1))
generated_images = self.reverse_diffusion(initial_noise, steps)
generated_images = self.denormalize(generated_images)
return generated_images
def train_step(self, images):
# normalize images to have standard deviation of 1, like the noises
images = self.normalizer(images, training=True)
noises = tf.random.normal(shape=images.shape)
diffusion_times = tf.random.uniform(
shape=(batch_size, 1, 1, 1), minval=0.0, maxval=1.0
)
noise_rates, signal_rates = self.diffusion_schedule(diffusion_times)
# mix the images with noises accordingly
noisy_images = signal_rates * images + noise_rates * noises
with tf.GradientTape() as tape:
# train the network to separate noisy images to their components
pred_noises, pred_images = self.denoise(
noisy_images, noise_rates, signal_rates, training=True
)
noise_loss = self.loss(noises, pred_noises) # used for training
image_loss = self.loss(images, pred_images) # only used as metric
gradients = tape.gradient(noise_loss, self.network.trainable_weights)
self.optimizer.apply_gradients(zip(gradients, self.network.trainable_weights))
self.noise_loss_tracker.update_state(noise_loss)
self.image_loss_tracker.update_state(image_loss)
# track the exponential moving averages of weights
for weight, ema_weight in zip(self.network.weights, self.ema_network.weights):
ema_weight.assign(ema * ema_weight + (1 - ema) * weight)
return {m.name: m.result() for m in self.metrics}
42.122.8. Complete Model#
Chose one of the residual networks.
network = get_network_custom(image_size,block_depth=10)
# network = get_network(image_size,widths,block_depth)
print(network.summary())
Model: "simple-residual-net"
__________________________________________________________________________________________________
Layer (type) Output Shape Param # Connected to
==================================================================================================
input_2 (InputLayer) [(None, 1, 1, 1)] 0 []
input_1 (InputLayer) [(None, 32, 32, 1)] 0 []
lambda (Lambda) (None, 1, 1, 64) 0 ['input_2[0][0]']
conv2d (Conv2D) (None, 32, 32, 32) 64 ['input_1[0][0]']
up_sampling2d (UpSampling2D) (None, 32, 32, 64) 0 ['lambda[0][0]']
concatenate (Concatenate) (None, 32, 32, 96) 0 ['conv2d[0][0]',
'up_sampling2d[0][0]']
conv2d_1 (Conv2D) (None, 32, 32, 64) 55360 ['concatenate[0][0]']
batch_normalization (BatchNorm (None, 32, 32, 64) 128 ['conv2d_1[0][0]']
alization)
conv2 (Conv2D) (None, 32, 32, 64) 36864 ['batch_normalization[0][0]']
batch_normalization_1 (BatchNo (None, 32, 32, 64) 128 ['conv2[0][0]']
rmalization)
conv3 (Conv2D) (None, 32, 32, 64) 36864 ['batch_normalization_1[0][0]']
batch_normalization_2 (BatchNo (None, 32, 32, 64) 128 ['conv3[0][0]']
rmalization)
conv4 (Conv2D) (None, 32, 32, 64) 36864 ['batch_normalization_2[0][0]']
batch_normalization_3 (BatchNo (None, 32, 32, 64) 128 ['conv4[0][0]']
rmalization)
conv5 (Conv2D) (None, 32, 32, 64) 36864 ['batch_normalization_3[0][0]']
batch_normalization_4 (BatchNo (None, 32, 32, 64) 128 ['conv5[0][0]']
rmalization)
conv6 (Conv2D) (None, 32, 32, 64) 36864 ['batch_normalization_4[0][0]']
batch_normalization_5 (BatchNo (None, 32, 32, 64) 128 ['conv6[0][0]']
rmalization)
conv7 (Conv2D) (None, 32, 32, 64) 36864 ['batch_normalization_5[0][0]']
batch_normalization_6 (BatchNo (None, 32, 32, 64) 128 ['conv7[0][0]']
rmalization)
conv8 (Conv2D) (None, 32, 32, 64) 36864 ['batch_normalization_6[0][0]']
batch_normalization_7 (BatchNo (None, 32, 32, 64) 128 ['conv8[0][0]']
rmalization)
conv9 (Conv2D) (None, 32, 32, 64) 36864 ['batch_normalization_7[0][0]']
batch_normalization_8 (BatchNo (None, 32, 32, 64) 128 ['conv9[0][0]']
rmalization)
conv10 (Conv2D) (None, 32, 32, 64) 36864 ['batch_normalization_8[0][0]']
conv2d_2 (Conv2D) (None, 32, 32, 1) 65 ['conv10[0][0]']
==================================================================================================
Total params: 388,417
Trainable params: 387,265
Non-trainable params: 1,152
__________________________________________________________________________________________________
None
model = DiffusionModel(network)
model.compile(
optimizer=tfa.optimizers.AdamW(learning_rate=learning_rate, weight_decay=weight_decay),
loss=tf.keras.losses.mean_absolute_error,
)
model.normalizer.adapt(train_dataset)
model.fit(
train_dataset,
epochs=num_epochs,
)
Epoch 1/10
937/937 [==============================] - 2197s 2s/step - n_loss: 0.1291 - i_loss: 0.3230
Epoch 2/10
937/937 [==============================] - 1940s 2s/step - n_loss: 0.0934 - i_loss: 0.2160
Epoch 3/10
937/937 [==============================] - 1929s 2s/step - n_loss: 0.0881 - i_loss: 0.2033
Epoch 4/10
937/937 [==============================] - 1960s 2s/step - n_loss: 0.0864 - i_loss: 0.1974
Epoch 5/10
937/937 [==============================] - 1923s 2s/step - n_loss: 0.0841 - i_loss: 0.1926
Epoch 6/10
937/937 [==============================] - 1923s 2s/step - n_loss: 0.0835 - i_loss: 0.1908
Epoch 7/10
937/937 [==============================] - 1926s 2s/step - n_loss: 0.0823 - i_loss: 0.1864
Epoch 8/10
937/937 [==============================] - 1948s 2s/step - n_loss: 0.0813 - i_loss: 0.1817
Epoch 9/10
937/937 [==============================] - 1923s 2s/step - n_loss: 0.0813 - i_loss: 0.1825
Epoch 10/10
937/937 [==============================] - 1927s 2s/step - n_loss: 0.0801 - i_loss: 0.1787
<keras.callbacks.History at 0x25c6dfaf370>
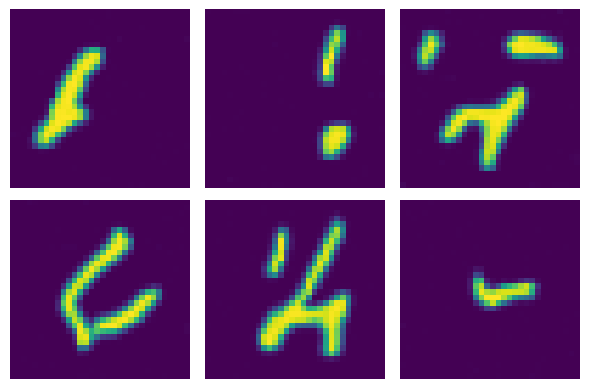
42.122.9. Visualize#
num_rows = 2
num_cols = 3
generated_images = model.generate(
num_images=num_rows * num_cols,
steps=diffusion_steps,
)
plt.figure(figsize=(num_cols * 2.0, num_rows * 2.0))
for row in range(num_rows):
for col in range(num_cols):
index = row * num_cols + col
plt.subplot(num_rows, num_cols, index + 1)
plt.imshow(generated_images[index])
plt.axis("off")
plt.tight_layout()
42.122.10. Acknowledgments#
Thanks to Maciej Skorski for creating Denoising Difussion Model. It inspires the majority of the content in this chapter.